| 1-Wire | I2C | SMBus | SPI | MicroWire/PLUS? | M-Bus (EN1434) | CAN (ISO11898) | LIN Bus | |
| Network Concept | single master, multiple slaves | multiple masters, multiple slaves | multiple masters, multiple slaves | single master, multiple slaves | single master, multiple slaves | single master, multiple slaves | multiple masters, multiple slaves | single master, multiple slaves |
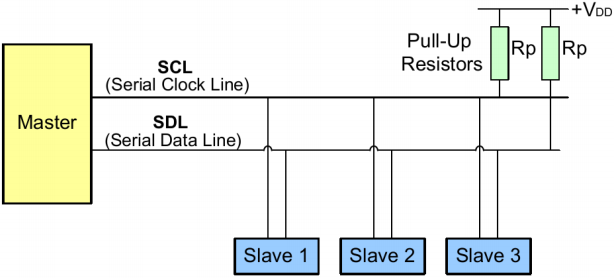
| Number of Signal Lines | 1 (IO) | 2, (SCL, SDA) | 2, (SMBCLK, SMBDAT) | 4, (active-low CS, SI, SO, SCK) | 4, (active-low CS, DI, DO, SK) | 2 (lines can be swapped) | 2 (CAN_H, CAN_L, terminated) | 1 (LIN) |
| Optional signals | N/A | N/A | SMBSUS#, SMBALERT# | N/A | N/A | N/A | 2nd GND, Power, Shield | N/A |
| Network Size | Up to 300 m (with suitable master circuit) | Limited by max. 400pF bus capacitance requirement | Limited by max. 400pF bus capacitance requirement | N/A (circuit board level) | N/A (circuit board level) | Max. 350m per segment of max. 250 slaves; max. 180nF | 40m @1M bps1000m @ 50k bps (example) | Up to 40m, max. 10nF total load |
| Network Interface | open drain, resistive or active master pull-up | open drain, resistive or active master pull-up | open drain, resistive or active master pull-up | Push-pull with tristate | Push-pull with tristate | M to S: voltage drive S to M: current load |
Differential open drain/source or open coll./emitter | open drain, resistive master pull-up |
| Network Voltage | From 2.8 to 6.0 V, device specific | From 1.8 to 5.5V, device specific | 2.7V to 5.5V | From 1.8V to 5.5V, device specific | From 1.8V to 5.5V, device specific | ~40V | VDD-VD (diode drop); ~4.5V max. | 8 to 18V |
| Logic Thresholds | Vary with network voltage | Fixed level: >1.5V, >3.0 V VDD-related level: <30%, >70% of VDD | <0.8V, >2.1V | VDD-related level: <20% (30%), >70% of VDD (inconsistent) | Fixed level: <0.8V, >2.0V; VDD-related level: <20% (30%), >70% (80%) of VDD (inconsistent) | Master to slave: 24V, 36V nominalSlave to master: <1.5mA, >11mA | Differential: <50mV (recessive), >1.5V (dominant); driver specification | VDD-related level: <20%, >80% of VDD (driver spec.)<40%, >60% of VDD (receiver spec.) |
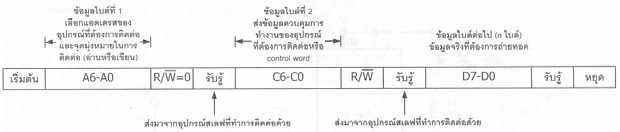
| Transmission | LS bit first, half-duplex | MS bit first plus Acknowledge bit, half-duplex | MS bit first plus Acknowledge bit, half-duplex | MS bit first, full-duplex | MS bit first, full-duplex | LS bit first, half-duplex, acknowledge response | MS bit first, half-duplex | LS bit first, half-duplex |
| Address Format | 56 bits | 7 bits, (10 bits defined but not implemented) | 7 bits, (10 bits defined but not implemented) | N/A | N/A | 8 bits (primary address), 64 bits (secondary address) | Message identifier 11 bits (standard format), 29 bits (extended format) | Message identifier 8 bits, including 2 parity bits |
| Network Inventory | Automatic, supports dynamic topology change | N/A; slave addresses hard-coded in firmware | ARP, Address Resolution Protocol (Rev. 2.0 only) | N/A; slave select (active-low CS) hard-coded in firmware | N/A; slave select (active-low CS) hard-coded in firmware | Automatic | N/A; message-based protocol, not address based | N/A; message-based protocol, not address based |
| Gross Data Rate | Standard: ~0 to 16.3k bps Overdrive: ~0 to 142k bps) | Standard: ~0 to 100k bps; Fast: ~0 to 400k bps; High-Speed: ~0 to 3.4M bps | 10k to 100k bps | ~0 to ~10 M bps (device specific) | ~0 to ~5 M bps (device specific) | 300, 2400, 9600 bps | ~0 to 1M bps | ~1k to ~20k bps |
| Access Time | Standard: ~ 5.4ms Overdrive: ~0.6ms (at maximum speed) | Standard: ~95?sFast: ~23?s(at maximum speed) | ~95?s @ 100k bps | N/A | N/A | Primary address, 2400 bps: 13.75ms (short frame), 27.5ms (long frame) | At 1M bps 19?s (standard) or 39?s (extended) from start of frame to 1st data bit | At 20k bps 1.7ms from start of frame to 1st data bit |
| Data Protection | 8-bit and 16-bit CRC | N/A | PEC Packet Error Code (Rev.1.1, 2.0) | N/A | N/A | Even parity, check sum, frames | 15-bit CRC, frames, frame acknowledge | Check sum, frames |
| Collision Detection | Yes, through non-matching CRC | Yes (multi-master operation only) | Yes (Rev. 2.0 only) | N/A | N/A | Yes ("medium" and "strong" collisions) | Yes: CSMA/CD | Yes, through check sum |
| Slave supply | Parasitic (typical), VDD (exception) | VDD only | VDD only | VDD only | VDD only | Parasitic and/or local supply | VDD only, local or remote source | Parasitic only |







How to Disable the Blank Screen on Raspberry Pi (Raspbian)
Here are two techniques to disable the blank screen on the Raspberry Pi. By default the screen is blanked after around 10/15 minutes if no user input (mouse or keyboard) is detected.
I successfully tested both methods with a Raspberry Pi 2 + latest Raspbian Jessie (v4.1) + 7-inch touchscreen display.
1 – Disabling the blank screen once
You can disable the blank screen once with the following command line instructions:
$ sudo xset s off $ sudo xset -dpms $ sudo xset s noblank
xset s off disable the screen saver, xset -dpms disables the DPMS (Display Power Management Signaling) and xset s noblank tells to X server to not blank the video device.
2 – Disabling the blank screen forever
If you want to disable the blank screen at every startup, just update the /etc/lightdm/lightdm.conf file and add in the [SeatDefaults] section the following command:
[SeatDefaults] xserver-command=X -s 0 -dpms
You need root rights to update the lightdm.conf file. You can use the nano editor:
$ sudo nano /etc/lightdm/lightdm.conf


























{kind=link}
{kind=link}
{kind=link}